基于管制负荷的空中交通网络抗级联失效策略*
时间:2023-11-03 12:50:03 来源:小苹果范文网 本文已影响 人 
刘苹妮,甘旭升,魏潇龙,孙静娟
(空军工程大学空管领航学院,西安 710051)
随着我国综合实力的增强,国际政治格局正在发生变化,周边环境中的不稳定因素开始活跃,对我国国民经济的稳定和持续发展构成一定制约。空中交通网络的安全与有序对我国军民航双方均有重要意义。对军队来讲,是遂行一系列军事任务的重要载体;
对民用航空来讲,是确保各类经济活动得以顺利实施的有力保障。一旦空中交通网络发生瘫痪或部分区域发生失效现象,将对国防安全与经济建设造成极大影响,是世界各国都在极力防控的问题。
基于复杂网络理论提升交通网络的抗毁性,是当前国内外采用的主要方法之一。2000 年,Amara 通过对世界航空网络的分析发现其具有小世界网络的特性,该结论对后续有关空中交通网络性能优化的研究起到巨大作用。2001 年,Moreno 对网络的级联失效现象展开研究,基于无标度网络对这一过程进行了模拟分析。Cheung 和Xu 通过研究均得出美国的空中交通网络具有小世界特性,网络的度分布具有“富人俱乐部”特性,这对抗级联失效的研究具有较大意义。在Motter 提出的“负载-容量”(ML)模型中则分析了节点负载与节点介数的关系,并分析了节点失效下负载再分配的过程。Wang 在研究中使用最邻近分配策略应对网络节点的故障问题,该方法也是当前应对网络级联失效的主要方法之一。Zhao 则基于ML 负载模型对无标度网络和小世界网络的鲁棒性进行了研究。齐雁楠基于ML 模型对空域扇区网络级联失效过程进行建模分析,并以相邻节点负载再分配策略提升网络的鲁棒性。武喜萍则从能量流转与消耗的角度出发研究网络节点对负载的消耗问题,并以SIR模型模拟级联失效现象在网络中的传播过程。傅超琦从能量的角度出发,研究了美国航空网络的增长对抗毁性的影响,研究发现网络的增长机制不同,对生存鲁棒性的影响较大。王兴隆构建空中交通CPS(cyber physical system,物理信息系统)模型对空中交通网络的级联失效现象展开研究,并制定了以度、介数和剩余容量为依据的负荷分配策略。张震针对当前大量研究中网络节点冗余容量固定不变的问题,构建了基于节点冗余容量动态控制的抗级联失效模型,并对网络的抗打击鲁棒性进行了分析。王立夫基于相邻节点最大剩余容量制定分配策略,并研究了节点之间路径长度对负荷分配的影响。
从国内外的研究中可看出,对于网络中的超容量负荷按照就近原则或按剩余容量分配是普遍方法,但与航空网络的实际运行情况会有所偏差。特别是对于工作负荷的消耗过程缺乏深入的研究,普遍以能量消耗过程模拟工作负荷的消耗。本文从管制员工作负荷的角度出发,研究空中交通网络中的超容量工作负荷分配策略,基于SIR 模型构建管制员工作负荷的消耗模型,在工作负荷分配中同时考虑了节点容量和流量信息,可使空中交通网络具备更好的鲁棒性。
从航空管制运行的角度出发,空中交通网络的组成主要包括由机场、进近(终端区)、区域管制部门组成的网络节点及航路航线构成的边。航空器的飞行指挥、动态监控、管制协同等工作则转化为工作负荷,以信息流的形式在各个网络节点之间流转。当节点担负的工作负荷量超出了管制部门的承受能力,则该节点进入故障状态。由于当前制约空中交通流量增长的主要因素仍是人为因素,当管制区内航空器数量达到空域的设计容量时,管制员往往已经处于极大的工作负荷之下,人为差错的引发概率增加,不利于空域运行的安全,因此,有必要从管制员工作负荷的角度出发研究空中交通网络的级联失效过程。
1.1 管制员工作负荷模型
1.1.1 管制工作负荷的计算
管制员的工作负荷主要可分为通信负荷、非通信负荷和思考负荷。通信负荷主要包括无线电陆空通话和电话协同;
非通信负荷包括飞行进程单的书写、飞行动态的监控和值班操作系统的操作行为;
思考负荷指管制指令发布前或操作执行前的决策行为。管制员的工作负荷为3 类负荷的相加值,如式(1)所示:

式中,WL为通信负荷;
WL为非通信负荷;
WL为思考负荷;
k为扇区内航路i 上程序报告点的数量;
N为扇区内航路i 上单位时间段内进入的航空器数量;
m 为航空器进行管制交接需要的平均指令数;
N 为扇区内单位时间段内进入的航空器数量;
Q为每条指令消耗的平均负荷;
l为扇区内航路i 上每架航空器书写进程单的负荷消耗;
WL为系统操作消耗的管制负荷;
R 为平均每架航空器需要的操作负荷;
WL为监控负荷;
wl为指挥飞机航向变化的工作负荷;
wl为指挥速度变化的工作负荷;
wl为指挥高度变化的工作负荷;
n~n为相应的管制指令数量。但该模型仍存在一定的缺陷:1)通信指令数量与航空器数量并非呈线性关系,该模型未考虑飞行冲突调配的工作负荷;
2)管制员的思考行为与一系列的执行行为往往并行推进,很难分离计算,模型中的工作负荷会比真实值偏大;
3)管制员监控负荷的大小与航空器数量并非简单的线性增加,强度还与管制员主观意愿相关,因此,需要对模型做出进一步改进。为能够模拟管制工作负荷在网络中的消耗转移过程,本文将管制工作负荷分为可积累负荷和不可积累负荷。可积累负荷主要包括管制员对航空器按照固定程序的指挥、飞行冲突的调配、进程单的书写和值班系统的操作;
不可积累负荷主要指飞行动态的监控行为。监控行为与其他行为存在显著的不同,其工作负荷不会因为前期的监控行为而减少,只与当前的空中态势相关,态势越复杂,负荷越大。改进的管制工作负荷计算公式为:

式中,b 为不考虑非固定指令条件下单架航空器的飞行进程单平均工作负荷与通信负荷之比;
Q 为管制指令的平均工作负荷。思考负荷不再单独计算,而是计入各类行为之中,与其成一定比例,而各类行为的工作负荷则可通过观测得到。例如:管制指令的负荷为其通话时间的长短,单位时间为s。其中,监控负荷不仅与空中航空器数量相关,还与管制员自身状态相关,当航空器数量大于一定阈值,监控负荷达到饱和,大量监控信息将无法被管制员接收。监控工作负荷如式(3)所示:
式中,N为管制员监控负荷达到饱和时的航空器数量;
s 为常数,代表监控工作负荷耗损率;
a 为管制员当前的注意力水平。
管制员的通信工作负荷主要来自于航空器的管制指挥,包括程序性的固定管制指令和实施飞行冲突解脱的非固定管制指令。由于每架航空器在指挥交接时均需要进行程序性的管制协调与交接,本文将电话和陆空通话中的管制协调与移交工作均纳入固定指令的范畴之内。非固定管制指令则是因为扇区空域内航空器数量的增加,航空器间的飞行冲突增多,由此产生进行冲突解脱调配的管制指令。非固定管制指令与航空器数量并不呈简单线性关系。根据一项研究的统计信息显示,我国终端区内非固定指令数量的增长与飞行流量呈现3 个阶段的变化关系。
第1 阶段为起始阶段,此时管制员责任区内的航空器数量较少,航空器间产生飞行冲突的概率较小,非固定指令数量与航空器的数量呈简单的递增关系,如式(4)所示:

式中,I为起始阶段非固定指令数;
K为常数;
N 为扇区内航空器的数量;
h 为小于零的常数,表示航空器数量较少时,非固定指令仍然可能为零。
第2 阶段为平稳增长阶段,此时管制员需要指挥的航空器数量处于适中水平,增长速度较第1 阶段小,如式(5)所示:

式中,I为平稳增长阶段非固定指令数;
K为常数;
I为起始阶段结束时非固定指令的数量。
第3 阶段为快速增长阶段,此时管制责任区内的航空器数量较多,且呈现拥堵迹象,飞行冲突发生的频率大增,管制员已很难全面掌握动态并及时发送正确的管制指令,非固定指令数量以二次函数式增加,如式(6)所示:

式中,I为快速增长阶段非固定指令数;
K为常数;
I为平稳增长阶段结束时非固定指令的数量。由此可得出航空器数量与管制指令的关系式,如式(7)所示:
式中,K为固定指令的增长斜率,为常数;
N和N分别为第1 阶段和第2 阶段的航空器数量阈值。根据空域结构的不同,式(7)中各系数会有一定的差异。根据式(2)~式(7),可最终得出管制员的工作负荷量。
1.1.2 管制工作负荷等级的划分
为避免管制员长期在高负荷状态下工作从而引发各类人为差错,国际民航组织(International Civil Aviation Organization,ICAO)和欧洲航行安全组织(Eurocontrol)在管制员工作负荷方面均给出了建议标准,其中,Eurocontrol 对管制员工作负荷的阈值划分标准如表1 所示。

表1 欧洲扇区空域运行中管制工作负荷阈值建议
过高的工作负荷会使管制员过快进入疲劳状态,而在疲劳状态下值班会加大人为差错发生概率。因此,从管制员工作负荷的角度出发,本文将网络节点的中度负荷上限值作为节点工作状态阈值,当单一节点的工作负荷超过中度负荷的上限值,节点则进入拥堵状态。
1.1.3 管制员注意力资源消耗模型构建
空中航空器的数量反映了现有工作负荷的状况,而工作负荷的消耗则是通过管制员的操作行为实现。因此,有必要建立起管制员工作状态与节点工作负荷间的联系。本文基于仓室(SIR)模型构建管制员注意力资源与工作负荷之间的动力学方程。1927 年,Kermack 和Mckendrick 在研究黑子病传播规律过程中提出了SIR 仓室模型,之后在传染病的相关研究中被广泛应用。SIR 模型能够很好地反映各仓室状态之间的转化关系,正符合管制员自身状态与工作负荷间的转化关系。
根据Wickens 提出的“信息处理与认知”模型,人的认知与决策过程可分为4 个阶段,分别为:信息的接收阶段、信息的分析阶段、决策与计划阶段和执行阶段。人在这一过程中作为系统的处理器存在,在外界接收信息的基础上进行分析和决策,并根据作出的决策执行一系列动作,这一过程与管制员的管制指挥过程一致,如图1 所示。
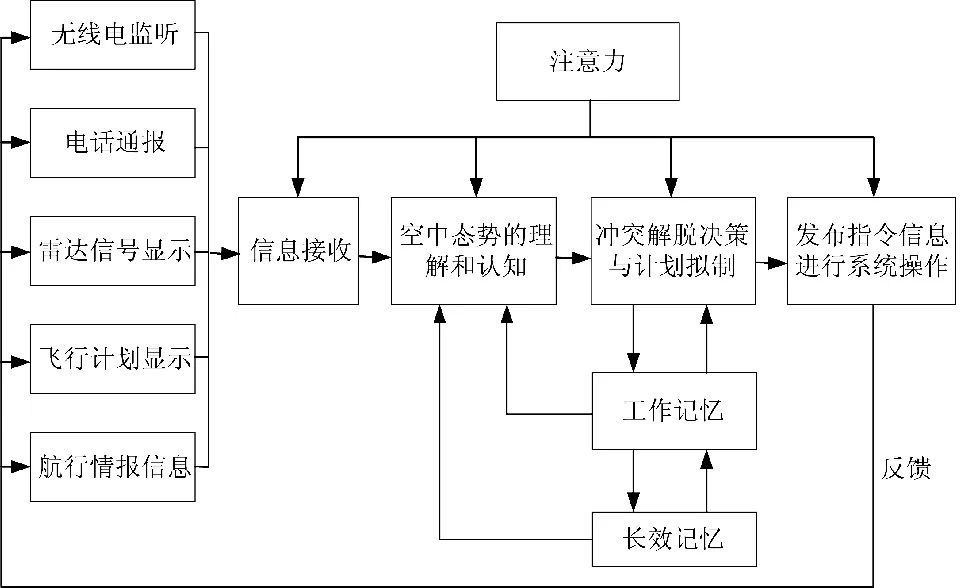
图1 管制员信息处理与认知模型
在人进行信息接收、分析、决策与执行这些行为的过程中,需要消耗管制员的注意力与记忆力资源。注意力资源与记忆力资源是人的精力状态的反映,当人的精力状态良好时工作效率往往较高,发生人为差错的概率低。因此,这一资源的数量又可反映管制员的工作负荷状态。本文假设管制员在管制指挥过程中对注意力资源和记忆力资源的消耗是同步的。在实际工作中,当管制员状态较为疲惫时,注意力和记忆力的下降是并发的,这样的假设与实际相符。因此,可直接构建管制员注意力资源与工作负荷间的动力学方程,如式(8)~式(11)所示:

式中,N 为管制责任区在单位时间内(通常为15 min或1 h)的航空器的平均数量;
N为单位时间内进出管制责任区的航空器数量,是流量信息;
Λ 为管制员单位时间内的注意力资源恢复值;
M 为工作负荷的生成速率;
N为第1 阶段非固定指令阈值;
N为第2 阶段非固定指令阈值。相对以往对节点负载的分流方法,式(8)~式(11)对节点负载的判定除基于当前瞬时容量外还考虑了流量信息,因此,在工作负荷的分流策略制定中能具备更好的预见性。记x=a,x=I,则方程可改写为:

根据李雅普诺夫稳定性判定方法,该平衡点是大范围渐进稳定的,证明方法如下:
先进行坐标点平移,可得到

带入式(12)后状态方程变为:
根据上式中的系统矩阵构造方程式:

式中,A 为式(14)的系统矩阵;
P 为构造的正定的实对称矩阵。可解得:

使用Sylvester 定理可判定其正定性。
由此得出系统式(12)的平衡点不仅唯一而且是大范围渐进稳定的。由式(8)~式(11)可看出,平衡点的大小与空域容量和流量有关,因此,可通过实时的飞行容量和流量信息评估管制员在未来一段时间内的工作负荷状态,这对网络节点工作负荷的分流有较大帮助。
1.2 空中交通网络级联失效过程
通常管制员一个班组的工作时间固定。根据欧洲航行安全组织基于工作时间的负荷判定标准,当管制员的工作时间超过53%时就进入高度负荷状态,此时空中交通网络节点状态变为拥堵。在现实生活中,机场是承担航空运输活动的最主要载体,也是最易受自然灾害或人为打击发生失效的节点,因此,对机场节点失效而引发的空中交通网络级联失效现象进行研究具有较大的现实意义。在机场跑道设施遭受打击或因自然灾害丧失航空器起降能力时,该节点即进入失效状态。但机场管制部门仍具备工作能力,可立即分流在空的航空器前往临近机场或具备接收能力的机场进行备降。在航空器的疏散过程中,工作负荷将先分流至进近或终端区管制部门,再由进近或终端区管制部门将工作负荷分流至降落机场节点。失效机场在疏散航空器过程中的注意力资源和空中剩余指令的动力学方程为:
根据式(17)中空中剩余指令的变化可得出疏散时间,并记为t,则可将分流的总飞行流量用下式表示:
分流的飞行流量则按照各邻接节点的剩余负载分流,如下式所示:

在飞行流量分流的过程中,若中途区域级管制节点工作负荷超过中等负荷的阈值,节点即进入拥堵状态,将限制涌入的飞行流量,不再接收分流的飞行流量。若拥堵节点邻接区域级节点均进入拥堵状态,无法接收分流的飞行流,则节点进入失效状态,并保持失效状态。若工作负荷超过超负荷状态上限值,则节点同样进入失效状态。在失效节点停止接收飞行流后,其原有的飞行流将涌入邻接区域级节点,从而引发一系列的级联失效过程。其中,进近、区调或终端区节点失效的后果将导致空中交通网络的大面积瘫痪,不再具备飞行流分流的机制,是网络级联失效的标志,也是本文研究的重点。机场节点的崩溃后果则是有限的,通过合理的应对措施可避免影响范围的扩大。级联失效流程如下页图2 所示。
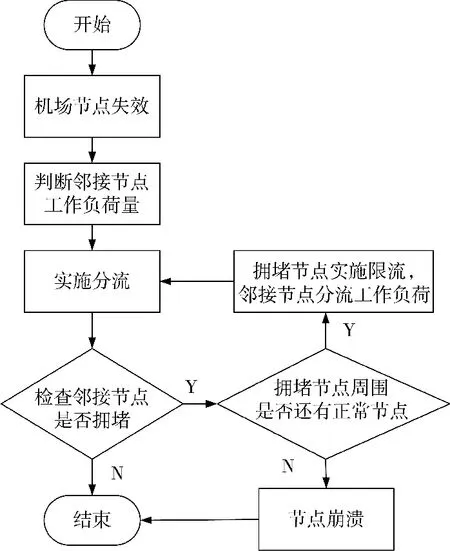
图2 空中交通网络级联失效流程图
2.1 机场级节点工作负荷转移方法
当机场失去飞机起降能力后,原本计划起飞的飞机全部在地面等待,计划来机场着陆的飞机则需要尽快找机场备降。由此,工作负荷会先传导至机场上级进近或终端区管制部门,再由进近或终端区管制部门根据附近机场实际负载情况分流在空航空器。通常在同一管辖区内的机场会因为协同工作量小和距离近的原因被优先考虑。在本辖区内机场不足以满足航空器的分流负载时,则需要协同相邻管制责任区,挑选大型枢纽机场来备降。本文对机场工作负荷的分流优先选取同一管制区内的临近机场进行备降,当管制区内临近机场无法满足工作负荷分类条件时,则在临近管制区内选取大型机场实施备降。
2.2 区域级节点工作负荷转移方法
机场节点失效后,机场管制部门会将在空飞机按飞行程序交接给上一级管制部门。进近或终端区需要根据辖区内机场工作负荷情况对在空飞机进行排序分流,分流策略按式(21)实施。当管制区内机场剩余负荷无法满足分流工作负荷时,则对邻接管制区内大型枢纽机场进行遍历,查找剩余负载充足且距离较近的机场共同分流工作负荷。在确定分流机场以后,进近或终端区将按比例将空中交通流进行分流处理。邻接的管制区在接收到分流航空器后再将工作负荷转移至区内备降机场。
选取华东部分区域作为仿真模拟对象,构建中低空管制运行网络,如图3 所示。图中中空和低空管制区域间的连接强度为辖区内大型枢纽机场之间的距离,依据强度信息遍历周边可分流工作负荷的邻接节点。
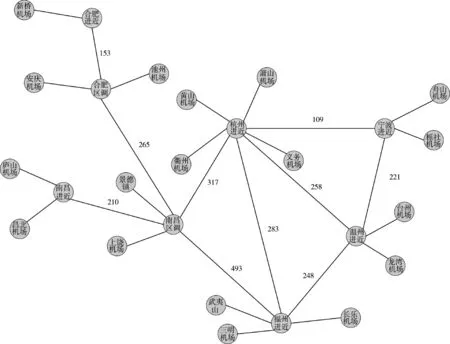
图3 华东地区中低空管制网络图
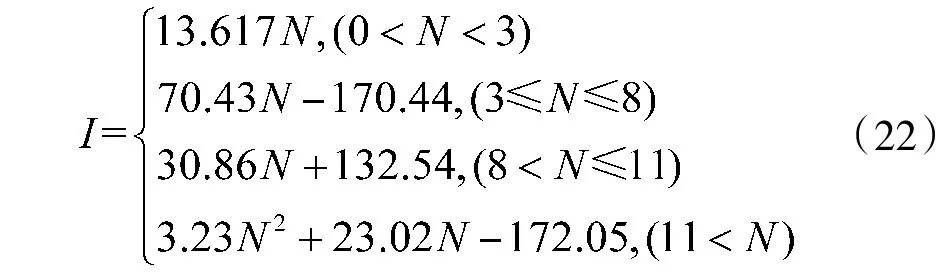
对于管制员工作负荷变化曲线,则基于文献[15]的调查研究结果得出。该文献对上海终端区内管制员的管制指挥指令数量与空中航空器数量之间的变化关系进行了研究,通过数据拟合得出了变化关系曲线,如式(22)所示。由于同一地区中低空管制员之间业务能力差异度不大,因此,使用同一变化曲线模拟管制员的工作负荷变化。
管制负荷的计算基于实时的容量与流量信息,因此,本文对各个管制区域内的航空器容量、流量及机场飞行起降流量进行统计。利用管制雷达监控设备每隔2 h 观测一次,分别记录下区内进离港的航空器数量和飞越的航空器数量。2021 年5 月22 日内各管制区域内的航空器容量信息如表2 所示。

表2 管制区域容量信息
从表2 中可以看出,各管制区域指令数量曲线除杭州进近处于第2 阶段以外,其余各区均处于第1 阶段。机场的流量信息则基于发布的航班时刻表数据,换算为15 min 内流量信息。换算过程中,去除了00:00~06:00 的时间段,因为该段时间内飞行量极小,影响数据准确性。同时,还统计了各机场的停机坪数量,作为机场的负载上限。各机场15 min 流量信息与停机坪数量如表3 所示。
(5)OLT通过此ONT认证请求,并配置该ONT的管理和业务通道,然后把属于ONT配置通过OMCI/TR069协议把配置下发到ONT上。

表3 机场流量与停机坪信息
通常在进近(终端区)或区调一级的单个班组工作时长为2 h,因此,将管制员的注意力资源值设置为7 200,单位为s。恢复值设为4,认为经过30 min的休整可再次工作2 h。通过对管制员指令的录音计时得出平均单个指令的时长约为3.5 s。管制员注意力资源损耗模型参数设置如下页表4 所示。
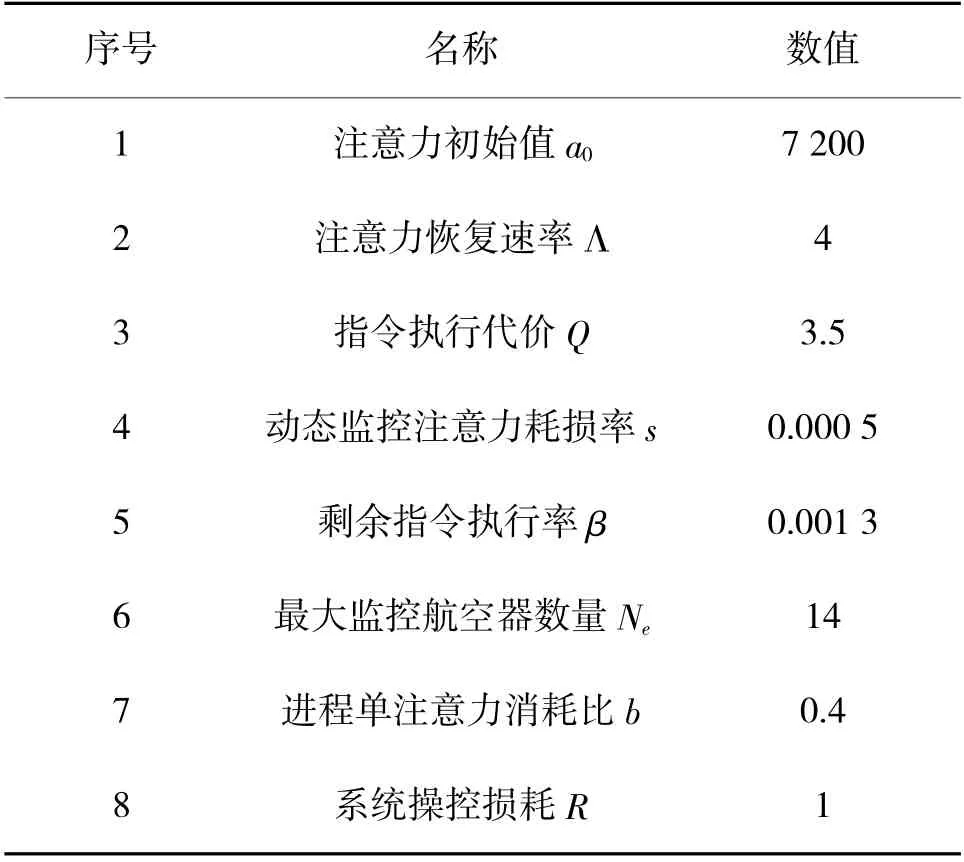
表4 管制员注意力资源消耗模型参数设置
若以杭州进近管制区为例,则依据其容量和流量信息可得出此时的剩余指令初始值I为419.538。飞行流量信息的计算方法如式(23)所示。



图4 管制员工作负荷变化曲线
按照式(13)得出的平衡点为(3949.09,421.4),可见管制员的工作负荷维持在中度负荷范围内,且在单个班组时限内并未达到平衡状态。空中剩余指令有略微的变化,但已达到平衡状态。
再以萧山机场遭受毁灭式打击或受恶劣气象条件影响丧失起降能力为背景,展开以管制员工作负荷为判断依据的空中交通网络级联失效过程模拟。当萧山机场丧失起降能力后,地面航空器中止放飞,空中航空器进行紧急备降。同时,杭州进近管制区域节点工作状态转变为“拥堵”,对于已经起飞计划来萧山机场着陆的飞行流则需要进行及时分流。杭州进近管制部门先按照辖区内机场负载情况分流在空航空器,当区内机场不足以承担备降任务时,遍历临近节点进行备降,遍历按照距离信息对临近节点进行遍历。各机场节点的最大理论负载上限为停机坪数量,当前载荷以随机数形式生成。各节点工作状态以向量形式存储,如式(24)所示。



图5 航空器疏散中的剩余指令消耗曲线
由于杭州进近下辖机场剩余负载不足以承担备降任务,因此,需要将机场紧急备降和着陆工作负荷分流至宁波栎社机场,备降工作负荷按照式(21)进行分流,分流后宁波进近的飞行流达到17.61 架/15 min。则宁波进近的管制员注意力资源变化曲线如下页图6 所示。

图6 宁波进近管制员注意力资源变化曲线
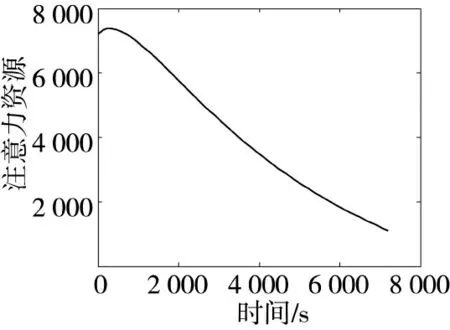
图7 温州进近管制员注意力资源变化曲线
温州进近管制员在工作4 108 s 后进入高度负荷状态,节点工作状态转变为“拥堵”,而宁波进近节点工作状态则转变为“失效”,形成级联失效过程。对此,本文对飞行流的分流加入工作负荷预测机制,在以节点剩余负载分流飞行流的同时预测管制工作负荷,对于达到高度负载或超负载的分流策略及时进行修正,继续遍历临近节点分流工作负荷,遏制节点拥堵和级联失效现象的发生。由于图6中已预测到宁波进近管制员的超负荷状态,因此,继续遍历临近节点进行飞行流分流。此时宁波进近的飞行流达到7.815 5 架/15 min,节点工作状态正常;
温州进近的飞行流将达到12.632 1 架/15 min,在时间为6 966 s 时,工作负荷变为高度负荷,如图8 所示。温州进近节点虽在高度负荷时长较短,但仍存在拥堵风险,因此,需要继续遍历分流负荷。
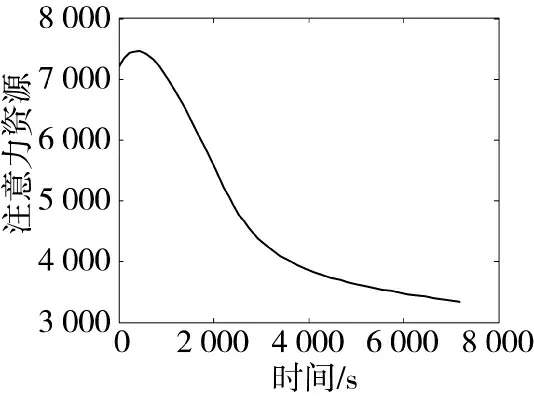
图8 第2 次遍历中温州进近管制员注意力资源变化曲线
第3 次遍历中的分流节点为宁波、温州、福州进近管制节点,各节点承载的飞行流分别为7.484 6架/15 min、11.308 2 架/15 min、8.071 9 架/15 min。可只对温州进近节点进行负荷预测,在同一负荷阶段内,若最大流量节点工作负荷状态正常,其余节点工作状态必然正常,温州进近管制员注意力资源变化如图9 所示。

图9 第3 次遍历中温州进近管制员注意力资源变化曲线
可见,以宁波、温州、福州进近节点进行紧急备降疏散和飞行流分流,可有效避免工作节点发生拥堵或失效现象,在最短距离内解决航空器备降,避免问题的影响范围扩散。
本文主要探讨飞行量较大的时段内的抗级联失效策略。民航主要以15 min 或1 h 为单位对责任区内的飞行流量和容量进行统计。因此,可结合15 min流量和容量数据进行1 次未来网络负荷的趋势预测和分流策略制定。而航空器由原机场转移至另一机场备降的时间间隔通常都在30 min 以上,且航班要求携带的剩余油量也在30 min 以上,有足够的时间开展工作负荷预测与分流策略调整。
本文基于仓储模型对空中交通网络抗级联失效策略展开研究,从管制员工作负荷的角度设计网络节点工作状态的预测方法和飞行流分流方法,避免级联失效现象的发生,得出结论如下:
1)空中交通网络节点负载的体现方式和分流原则具有其特殊性。节点负载需综合考虑空域环境和人为因素,负荷分流则需综合考虑风险和效率问题,因此,不能进行直接的临近节点负荷分配,需进行先期负载预测。
2)空中交通网络节点的工作状态不但可以基于容量来判断,还可以基于管制员工作负荷状态来判断,当工作负荷过重时,即使机场设施具备承载能力,节点同样会进入“拥堵”状态,从而由人为因素引发航空安全事故。
3)本文在节点负荷的预测中,同时使用了节点空域的容量信息和流量信息,相对传统只基于容量的负荷分流策略具有更好的风险预见性,可降低级联失效现象发生概率。
猜你喜欢 管制员航空器分流 单跑道放飞间隔咨询通告科技信息·学术版(2021年1期)2021-12-17航空器尾流重新分类(RECAT-CN)国内运行现状分析科学与财富(2021年33期)2021-05-10航空器拆解适航管理解读航空维修与工程(2021年1期)2021-04-12空中交通管制员疲劳分析及对策研究青年生活(2020年31期)2020-10-14说泾渭东坡赤壁诗词(2019年5期)2019-11-14无人航空器在农业方面的应用农民致富之友(2019年8期)2019-05-22空中交通管制员综合能力的培养科学与财富(2019年6期)2019-04-04长江河口南北槽分流口工程及瑞丰沙地形变化对分流比的影响华东师范大学学报(自然科学版)(2018年3期)2018-05-14控制塔创新作文(1-2年级)(2017年4期)2017-09-22《飞机起飞了》航空知识(2017年2期)2017-03-17